微云全息(NASDAQ:HOLO)点云降噪算法为单光子激光雷达数据进行实时3D全息重建
微云全息(NASDAQ:HOLO)点云降噪算法为单光子激光雷达数据进行实时3D全息重建
微云全息(NASDAQ:HOLO)在全息激光雷达的点云算法领域一直处于行业领先地位,微云全息服务众多知名的新能源汽车企业以及ADAS汽车控制系统集成商或设备研发企业。随着汽车制造商和领先的移动技术领域,寻求全面的数字感知解决方案以加速和规模化其自动驾驶技术的应用。微云全息全息激光雷达利用这一市场趋势为大规模自动驾驶量产提供优秀的解决方案。
3D全息激光雷达点云成像技术不断取得快速的发展,但是目前的现有的计算成像算法通常要么太慢,要么不够精细或者需要基于极高的算力,甚至最近的基于卷积神经网络(CNN)估计场景深度的算法,训练后都难以达到实时的要求。微云全息提出了一种新的算法结构,以满足速度、鲁棒性和可扩展性的要求。该算法有效地将目标表面建模为嵌入3D空间中的二维流形。使用计算机图形的点云去噪工具实现的。由此产生的算法可以合并有关观测模型的信息,例如泊松噪声、存在坏点的像素、压缩传感等。同时利用计算机图形的流形建模工具。通过选择大规模并行降噪器,所提出的方法每秒可以处理数十帧,微云全息的基于单光子激光雷达的算法,包含深度更新、强度更新和背景更新三个主要步骤。
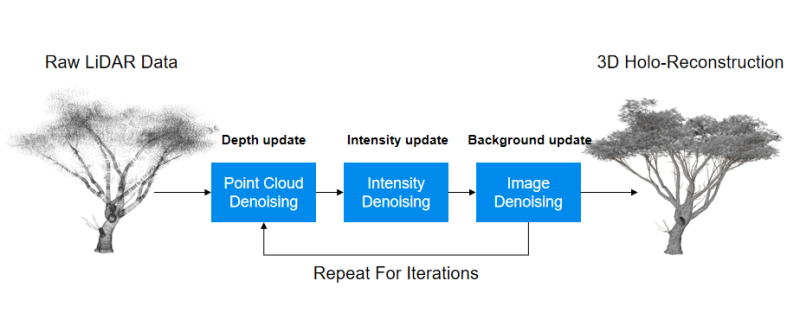
深度更新:对深度变量采取渐变步骤与点云使用点集曲面算法进行去噪,在三维全息空间的坐标系中运行。对光滑的连续曲面进行适配,适配由内核控制。与传统的深度图像降噪相比,微云全息点云降噪可以处理每个像素任意数量的表面,而不管激光雷达系统的像素格式如何。此外,所有3D点进行并行处理,使得运算时间非常短。
强度更新:在此更新中,渐变步骤是针对单个像素在3D全息空间中的坐标进行降噪。通过这种方式,只需要考虑同一表面内点之间的相关性。使用每个点的最近邻的低通滤波器。此步骤仅考虑局部相关性,并且并行处理所有点。在去噪步骤之后,我们去除强度低于给定阈值的点,该阈值设置为最小允许反射率。
背景更新:与强度和深度更新类似的方式,取决于激光雷达系统的特性。在双基光栅扫描系统中,激光源和单光子探测器不是同轴的,背景计数不一定在空间上相关。因此,不会对背景应用空间规律化,在这种情况下,降噪操作简化为恒等式。在单站光栅扫描系统和激光雷达阵列中,背景检测类似于被动图像。在这种情况下,空间规律化有助于改进估计值。因此,我们用现成的图像去噪算法,其计算复杂度较低。
微云全息这种新的计算框架,基于从单光子数据进行实时三维全息场景的重建。通过将统计模型与计算机图形的高度可扩展的计算工具相结合,可进行复杂户外场景的3D重建,处理时间约为10-20毫秒。微云全息所提出的方法可以处理每个像素中未知数量的表面,该算法允许通过复杂场景的进行目标检测和成像。这能够对复杂的移动场景进行稳定的实时目标重建,为实现3D全息成像应用的视频速率单光子激光雷达技术铺平了道路。
3D全息场景的重建可以应用在多个重要领域,例如自主导航、环境检测和其他计算机视觉任务。3D全息场景重建拥有多个技术领域,如RGB-D传感器获取发射率成像,立体成像或全波形激光雷达3D全息成像等。与之相比,微云全息单光子激光雷达技术方案有几个突出的优势,微云全息单光子激光雷达功率低灵敏度高是安全的激光光源,在高散射的水下环境或者极端大雾环境下已经实现了高分率三维全息图像的重建。
微云全息在全息激光雷达的点云算法领域一直处于行业领先地位,微云全息服务众多知名的新能源汽车企业以及ADAS汽车控制系统集成商或设备研发企业。随着汽车制造商和领先的移动技术领域,寻求全面的数字感知解决方案以加速和规模化其自动驾驶技术的应用。微云全息全息激光雷达利用这一市场趋势为大规模自动驾驶量产提供优秀的解决方案。
相关文章
- 易享·非凡视界 三星The Wall塑造叹为观止的视觉体验
- 秒杀福利!天猫开学季,这些致态好物值得冲!
- 黑天鹅事件频发,外部环境变化大 佳沃食品如何掘金三文鱼市场
- 情人节将至,品牌如何借势“浪漫经济”营销?
- 亚马逊四季度利润大幅下滑:云计算业务发展稳步提升
- 抖音打击“胡*宇”事件相关不实信息,处置相关谣言8.5万条
- 嵌入式冰箱持续“走红” 容声冰箱引领潮流创新“无界空间”
- 第三届腾讯Light·技术公益创造营正式启动:聚焦三大议题,探索技术公益可持续路径
- 方太上榜浙江省“未来工厂”名单,以智能制造助力高质量发展
- 入手一款小家电解锁元宵新吃法 京东家电购品质家电享买贵必赔服务
- into you心慕与你引领唇妆风向标,收获众多消费者青睐
- 三维天地实施系统应用项目获评山东省优秀大数据应用案例
- 春节营销大考品牌如何取胜?米博以“减法”给出高分答案
- 2万医生抖音开讲 短视频成健康科普重要渠道
- 三星Galaxy S23系列先行者抢购售罄 国行版发布敬请期待
- 买投影仪后悔死了?「8不买」,什么样的投影仪才是物超所值?
热门教程
Win11安卓子系统怎么安装和卸载安卓APK
2系统之家装机大师怎么用?系统之家装机大师使用教程
3Win11正式版怎么安装安卓APK应用?Win11安装安卓APK文件方法
4Win11资源管理器的样式如何切换?Win11资源管理器样式切换方法
5Win11怎么装抖音APP Win11安装抖音APP教程
6Win11蓝屏怎么修复?win11蓝屏修复教程
7Win11电脑下载的文件被自动删除怎么办?
8Win11正式版如何固定“此电脑”到任务栏?
9Win10和Win11哪个好用?Win10和Win11区别介绍
10老电脑怎么装win11系统?老电脑一键升级Win11系统教程
装机必备 更多+
重装教程
大家都在看
电脑教程专题 更多+